Dynamic Optimization with DAE Collocation#
Many engineering problems involve dynamics — systems that evolve over time according to differential equations. Examples include:
Optimal control: find inputs that drive a system to a desired state with minimum cost
Parameter estimation: fit kinetic parameters to experimental time-series data
Experiment design: choose operating conditions to maximize information content
PDE-constrained optimization: optimize systems governed by partial differential equations
The discopt.dae module transcribes ODE/DAE systems into algebraic constraints using orthogonal collocation on finite elements [Biegler, 2010] or finite differences, enabling these problems to be solved as standard NLPs within discopt’s existing solver infrastructure.
This tutorial covers:
Orthogonal collocation background
First-order ODEs (exponential decay, chemical kinetics)
Parameter estimation from experimental data
Optimal control with piecewise-constant controls
Second-order ODEs (harmonic oscillator)
Index-1 DAEs (algebraic constraints)
Method of lines for 1D PDEs
Finite-difference discretization
%matplotlib inline
import os
os.environ["JAX_PLATFORMS"] = "cpu"
os.environ["JAX_ENABLE_X64"] = "1"
import matplotlib.pyplot as plt
import numpy as np
from discopt import Model
from discopt.dae import (
ContinuousSet,
DAEBuilder,
FDBuilder,
align_time_grid,
collocation_matrix,
legendre_roots,
radau_roots,
)
print("All imports successful")
All imports successful
1. Orthogonal Collocation Background#
Orthogonal collocation on finite elements [Biegler, 2010] is the workhorse method for transcribing ODE/DAE systems into algebraic constraints suitable for NLP solvers. The idea is to divide the time horizon \([t_0, t_f]\) into \(N_{fe}\) finite elements, and within each element approximate the state trajectory as a polynomial that passes through selected collocation points.
Collocation schemes#
Two families of collocation points are commonly used:
Radau IIA: Points are the roots of a shifted Radau polynomial on \([0, 1]\). The last point is always \(\tau = 1\) (the element boundary), which provides automatic \(C^0\) continuity between elements. This is the default in discopt.
Gauss–Legendre: Points are the roots of a Legendre polynomial mapped to \((0, 1)\). Neither endpoint is included, giving higher-order accuracy but requiring explicit continuity constraints.
Differentiation matrix#
Given the full node set \([0, \tau_1, \ldots, \tau_{n_{cp}}]\) (element start plus collocation points), the differentiation matrix \(A \in \mathbb{R}^{n_{cp} \times (n_{cp}+1)}\) maps function values at all nodes to derivative values at the collocation points:
where \(L_k\) is the \(k\)-th Lagrange basis polynomial through the full node set. The collocation equation for state \(x\) in element \(i\) at collocation point \(j\) is:
where \(h_i\) is the element width and \(f\) is the ODE right-hand side [Cuthrell and Biegler, 1987].
Let’s inspect the collocation points and differentiation matrices.
# Radau IIA roots for different numbers of collocation points
for ncp in range(1, 6):
roots = radau_roots(ncp)
print(f"Radau ncp={ncp}: {np.array2string(roots, precision=6)}")
print()
# Gauss-Legendre roots
for ncp in range(1, 5):
roots = legendre_roots(ncp)
print(f"Legendre ncp={ncp}: {np.array2string(roots, precision=6)}")
print()
# Differentiation matrix for Radau with 3 collocation points
A, w = collocation_matrix(3, "radau")
print("Differentiation matrix A (Radau, ncp=3):")
print(np.array2string(A, precision=4, suppress_small=True))
print(f"\nContinuity weights w: {np.array2string(w, precision=4)}")
print(f"A shape: {A.shape} (ncp x (ncp+1))")
Radau ncp=1: [1.]
Radau ncp=2: [0.333333 1. ]
Radau ncp=3: [0.155051 0.644949 1. ]
Radau ncp=4: [0.088588 0.409467 0.787659 1. ]
Radau ncp=5: [0.057104 0.276843 0.58359 0.86024 1. ]
Legendre ncp=1: [0.5]
Legendre ncp=2: [0.211325 0.788675]
Legendre ncp=3: [0.112702 0.5 0.887298]
Legendre ncp=4: [0.069432 0.330009 0.669991 0.930568]
Differentiation matrix A (Radau, ncp=3):
[[-4.1394 3.2247 1.1678 -0.2532]
[ 1.7394 -3.5678 0.7753 1.0532]
[-3. 5.532 -7.532 5. ]]
Continuity weights w: [-0. 0. -0. 1.]
A shape: (3, 4) (ncp x (ncp+1))
2. First-Order ODEs: Exponential Decay#
We start with the simplest possible ODE — exponential decay:
The exact solution is \(x(t) = e^{-t}\). We’ll solve this as a feasibility problem (no objective) and compare the collocation solution with the analytical result.
The workflow with DAEBuilder is:
Create a
Modeland aContinuousSet(time domain + discretization parameters)Create a
DAEBuilderand declare states withadd_state()Define the ODE right-hand side with
set_ode()Call
discretize()to generate all variables and constraintsSolve and extract the solution
# Model setup
m = Model("exp_decay")
cs = ContinuousSet("t", bounds=(0, 5), nfe=10, ncp=3, scheme="radau")
dae = DAEBuilder(m, cs)
# Declare state with initial condition
dae.add_state("x", initial=1.0, bounds=(0, 2))
# ODE: dx/dt = -x
dae.set_ode(lambda t, states, alg, ctrl: {"x": -states["x"]})
# Discretize and solve (minimize 0 = feasibility problem)
dae.discretize()
m.minimize(0)
result = m.solve()
print(f"Status: {result.status}")
# Extract and plot
t_num, x_num = dae.extract_solution(result, "x")
t_exact = np.linspace(0, 5, 200)
x_exact = np.exp(-t_exact)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(10, 4))
ax1.plot(t_exact, x_exact, "k-", label="Exact: $e^{-t}$", linewidth=2)
ax1.plot(t_num, x_num, "ro", markersize=5, label=f"Collocation ({cs.nfe} elements, {cs.ncp} cp)")
ax1.set_xlabel("t")
ax1.set_ylabel("x(t)")
ax1.set_title("Exponential Decay")
ax1.legend()
# Error plot
x_exact_at_nodes = np.exp(-t_num)
error = np.abs(x_num - x_exact_at_nodes)
ax2.semilogy(t_num, error, "bo-", markersize=4)
ax2.set_xlabel("t")
ax2.set_ylabel("Absolute error")
ax2.set_title("Collocation Error")
ax2.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
max_err = np.max(error)
print(f"Max absolute error: {max_err:.2e}")
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit https://github.com/coin-or/Ipopt
******************************************************************************
Status: optimal
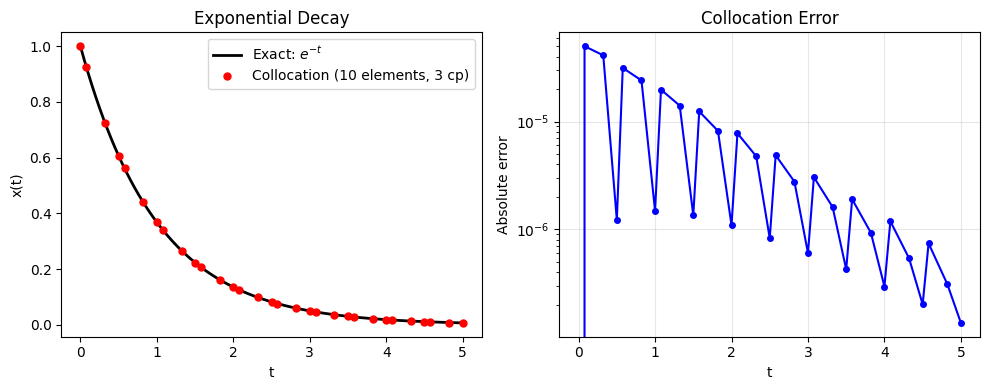
Max absolute error: 5.00e-05
3. Two-Species Chemical Kinetics#
Consider a series reaction \(A \xrightarrow{k_1} B \xrightarrow{k_2} C\) governed by:
with initial conditions \(A(0) = 1\), \(B(0) = 0\) and rate constants \(k_1 = 2\), \(k_2 = 1\).
The analytical solution is:
This example demonstrates multiple coupled states in the set_ode() callback.
k1, k2 = 2.0, 1.0
m = Model("kinetics")
cs = ContinuousSet("t", bounds=(0, 5), nfe=15, ncp=3)
dae = DAEBuilder(m, cs)
dae.add_state("A", initial=1.0, bounds=(0, 2))
dae.add_state("B", initial=0.0, bounds=(0, 2))
def kinetics_rhs(t, states, alg, ctrl):
A = states["A"]
B = states["B"]
return {
"A": -k1 * A,
"B": k1 * A - k2 * B,
}
dae.set_ode(kinetics_rhs)
dae.discretize()
m.minimize(0)
result = m.solve()
print(f"Status: {result.status}")
t_A, A_num = dae.extract_solution(result, "A")
t_B, B_num = dae.extract_solution(result, "B")
# Analytical solutions
t_exact = np.linspace(0, 5, 200)
A_exact = np.exp(-k1 * t_exact)
B_exact = k1 / (k2 - k1) * (np.exp(-k1 * t_exact) - np.exp(-k2 * t_exact))
plt.figure(figsize=(8, 5))
plt.plot(t_exact, A_exact, "b-", linewidth=2, label="A (exact)")
plt.plot(t_exact, B_exact, "r-", linewidth=2, label="B (exact)")
plt.plot(t_A, A_num, "bs", markersize=5, label="A (collocation)")
plt.plot(t_B, B_num, "ro", markersize=5, label="B (collocation)")
plt.xlabel("t")
plt.ylabel("Concentration")
plt.title("Series Reaction $A \\to B \\to C$")
plt.legend()
plt.grid(True, alpha=0.3)
plt.show()
# Check errors
A_exact_nodes = np.exp(-k1 * t_A)
B_exact_nodes = k1 / (k2 - k1) * (np.exp(-k1 * t_B) - np.exp(-k2 * t_B))
print(f"Max error A: {np.max(np.abs(A_num - A_exact_nodes)):.2e}")
print(f"Max error B: {np.max(np.abs(B_num - B_exact_nodes)):.2e}")
Status: optimal

Max error A: 1.41e-04
Max error B: 2.60e-04
4. Parameter Estimation#
A common application of dynamic optimization is parameter estimation: given noisy experimental data, find the model parameters that best fit the observations.
We’ll estimate the decay rate \(k\) from noisy measurements of exponential decay \(dx/dt = -kx\), \(x(0) = 1\). The true value is \(k = 0.5\).
The optimization problem is:
where \(\hat{x}_i\) are the noisy measurements at times \(t_i\).
Two convenience utilities simplify this workflow:
align_time_grid()adjusts element boundaries so measurement times coincide with element boundaries (where collocation nodes exist).DAEBuilder.least_squares()builds the sum-of-squared-residuals objective by mapping each measurement to the nearest collocation node.
# Generate synthetic noisy data
k_true = 0.5
np.random.seed(42)
t_data = np.array([0.5, 1.0, 1.5, 2.0, 3.0, 4.0, 5.0])
x_data = np.exp(-k_true * t_data) + 0.02 * np.random.randn(len(t_data))
# Align the time grid so element boundaries include measurement times
eb = align_time_grid(t_span=(0, 5), nfe=20, measurement_times=t_data)
print(f"Aligned grid: {len(eb) - 1} elements")
# Build the estimation problem
m = Model("param_estimation")
cs = ContinuousSet("t", bounds=(0, 5), nfe=len(eb) - 1, ncp=3, element_boundaries=eb)
dae = DAEBuilder(m, cs)
dae.add_state("x", initial=1.0, bounds=(0, 2))
# k is a free parameter to estimate
k = m.continuous("k", lb=0.01, ub=5.0)
# ODE: dx/dt = -k*x (k is a model variable, not a Python constant)
dae.set_ode(lambda t, states, alg, ctrl: {"x": -k * states["x"]})
dae.discretize()
# Build least-squares objective using the convenience method
m.minimize(dae.least_squares("x", t_data, x_data))
result = m.solve()
k_est = result.value(k)
print(f"Status: {result.status}")
print(f"Estimated k: {k_est:.4f} (true: {k_true})")
print(f"Relative error: {abs(k_est - k_true) / k_true * 100:.2f}%")
# Plot fit vs data
t_sol, x_sol = dae.extract_solution(result, "x")
t_fine = np.linspace(0, 5, 200)
plt.figure(figsize=(8, 5))
plt.plot(t_fine, np.exp(-k_true * t_fine), "k--", linewidth=1.5, label=f"True ($k={k_true}$)")
plt.plot(t_sol, x_sol, "b-", linewidth=2, label=f"Estimated ($k={k_est:.3f}$)")
plt.plot(t_data, x_data, "ro", markersize=8, label="Noisy data")
plt.xlabel("t")
plt.ylabel("x(t)")
plt.title("Parameter Estimation: Exponential Decay")
plt.legend()
plt.grid(True, alpha=0.3)
plt.show()
Aligned grid: 20 elements
Status: optimal
Estimated k: 0.4836 (true: 0.5)
Relative error: 3.27%

5. Optimal Control#
In optimal control, we seek an input (control) trajectory \(u(t)\) that drives a dynamic system to achieve some objective. Consider the linear system:
with the objective of minimizing integrated control effort plus a terminal penalty:
The control \(u\) is piecewise constant over each finite element, declared
via add_control(). The integral is computed using the collocation quadrature
weights via dae.integral() [Betts, 2010].
m = Model("optimal_control")
cs = ContinuousSet("t", bounds=(0, 5), nfe=20, ncp=3)
dae = DAEBuilder(m, cs)
dae.add_state("x", initial=1.0, bounds=(-5, 5))
dae.add_control("u", bounds=(-2, 2))
# ODE: dx/dt = -x + u
dae.set_ode(lambda t, states, alg, ctrl: {"x": -states["x"] + ctrl["u"]})
dae.discretize()
# Objective: integral of u^2 + terminal penalty on x(tf)
integral_cost = dae.integral(lambda t, s, a, c: c["u"] ** 2)
x_var = dae.get_state("x")
terminal_penalty = 10.0 * x_var[-1, -1] ** 2
m.minimize(integral_cost + terminal_penalty)
result = m.solve()
print(f"Status: {result.status}")
print(f"Objective: {result.objective:.4f}")
# Extract solution
t_x, x_sol = dae.extract_solution(result, "x")
u_var = dae.get_state("u")
u_sol = result.value(u_var)
# Control is piecewise constant: one value per element
t0, tf = cs.bounds
h = (tf - t0) / cs.nfe
t_u_edges = np.array([t0 + i * h for i in range(cs.nfe + 1)])
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(8, 6), sharex=True)
ax1.plot(t_x, x_sol, "b-o", markersize=3, linewidth=1.5, label="x(t)")
ax1.axhline(y=0, color="gray", linestyle="--", alpha=0.5)
ax1.set_ylabel("State x(t)")
ax1.set_title("Optimal Control: $dx/dt = -x + u$")
ax1.legend()
ax1.grid(True, alpha=0.3)
# Plot piecewise constant control as step function
for i in range(cs.nfe):
ax2.plot([t_u_edges[i], t_u_edges[i + 1]], [u_sol[i], u_sol[i]], "r-", linewidth=2)
if i < cs.nfe - 1:
ax2.plot(
[t_u_edges[i + 1], t_u_edges[i + 1]], [u_sol[i], u_sol[i + 1]], "r:", linewidth=0.5
)
ax2.set_xlabel("t")
ax2.set_ylabel("Control u(t)")
ax2.legend(["u(t)"])
ax2.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print(f"Terminal state x(5) = {x_sol[-1]:.6f}")
print(f"Terminal penalty: {10 * x_sol[-1] ** 2:.6f}")
Status: optimal
Objective: 0.0001

Terminal state x(5) = 0.001128
Terminal penalty: 0.000013
6. Second-Order ODEs: Harmonic Oscillator#
Many physical systems are naturally described by second-order ODEs. The harmonic oscillator is:
with exact solution \(x(t) = \cos(t)\).
The add_second_order_state() method automatically introduces a velocity
variable and the coupling \(dx/dt = v\). The user only needs to supply the
acceleration via set_second_order_ode().
m = Model("harmonic_oscillator")
cs = ContinuousSet("t", bounds=(0, 4 * np.pi), nfe=40, ncp=3)
dae = DAEBuilder(m, cs)
# Second-order state: position x, automatically creates velocity dx_dt
dae.add_second_order_state(
"x",
initial=1.0, # x(0) = 1
initial_velocity=0.0, # dx/dt(0) = 0
bounds=(-2, 2),
velocity_bounds=(-2, 2),
)
# Acceleration: d^2x/dt^2 = -x
dae.set_second_order_ode(lambda t, pos, vel, alg, ctrl: {"x": -pos["x"]})
dae.discretize()
m.minimize(0)
result = m.solve()
print(f"Status: {result.status}")
# Extract position and velocity
t_x, x_sol = dae.extract_solution(result, "x")
t_v, v_sol = dae.extract_solution(result, "dx_dt")
t_exact = np.linspace(0, 4 * np.pi, 500)
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(10, 6), sharex=True)
ax1.plot(t_exact, np.cos(t_exact), "k-", linewidth=2, label="Exact: $\\cos(t)$")
ax1.plot(t_x, x_sol, "ro", markersize=3, label="Collocation")
ax1.set_ylabel("Position x(t)")
ax1.set_title("Harmonic Oscillator: $d^2x/dt^2 = -x$")
ax1.legend()
ax1.grid(True, alpha=0.3)
ax2.plot(t_exact, -np.sin(t_exact), "k-", linewidth=2, label="Exact: $-\\sin(t)$")
ax2.plot(t_v, v_sol, "bo", markersize=3, label="Collocation")
ax2.set_xlabel("t")
ax2.set_ylabel("Velocity $dx/dt$")
ax2.legend()
ax2.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
x_exact_nodes = np.cos(t_x)
print(f"Max position error: {np.max(np.abs(x_sol - x_exact_nodes)):.2e}")
Status: optimal

Max position error: 1.32e-05
7. Index-1 DAE#
A differential-algebraic equation (DAE) couples differential states \(x\) with algebraic variables \(z\) that satisfy algebraic (non-differential) constraints. An index-1 DAE has the form:
where the Jacobian \(\partial g / \partial z\) is nonsingular.
Consider the system:
The algebraic constraint forces \(z = x^2\) at all times, so the ODE reduces to \(dx/dt = -x + x^2\), which is a Bernoulli equation with known solution.
With DAEBuilder, algebraic variables are declared via add_algebraic() and
the algebraic equations via set_algebraic(). Algebraic variables exist only
at collocation points (not at element boundaries) [Biegler, 2010].
m = Model("index1_dae")
cs = ContinuousSet("t", bounds=(0, 3), nfe=20, ncp=3)
dae = DAEBuilder(m, cs)
dae.add_state("x", initial=0.5, bounds=(0, 2))
dae.add_algebraic("z", bounds=(0, 4))
# ODE: dx/dt = -x + z
dae.set_ode(lambda t, s, a, c: {"x": -s["x"] + a["z"]})
# Algebraic: 0 = x^2 - z
dae.set_algebraic(lambda t, s, a, c: {"z": s["x"] ** 2 - a["z"]})
dae.discretize()
m.minimize(0)
result = m.solve()
print(f"Status: {result.status}")
t_x, x_sol = dae.extract_solution(result, "x")
# Exact solution: dx/dt = -x + x^2 is a Bernoulli equation.
# With substitution y = 1/x: dy/dt = 1 - y, y(0) = 1/x(0) = 2
# y(t) = 1 + (y0 - 1)*exp(-t) = 1 + exp(-t)
# x(t) = 1 / (1 + exp(-t))
x0 = 0.5
y0 = 1.0 / x0
t_fine = np.linspace(0, 3, 200)
y_exact = 1.0 + (y0 - 1.0) * np.exp(-t_fine)
x_exact = 1.0 / y_exact
z_exact = x_exact**2
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(10, 4))
ax1.plot(t_fine, x_exact, "k-", linewidth=2, label="Exact x(t)")
ax1.plot(t_x, x_sol, "ro", markersize=4, label="Collocation x(t)")
ax1.plot(t_fine, z_exact, "b--", linewidth=2, label="Exact z(t) = x(t)$^2$")
ax1.set_xlabel("t")
ax1.set_ylabel("Value")
ax1.set_title("Index-1 DAE: $dx/dt = -x + z$, $0 = x^2 - z$")
ax1.legend()
ax1.grid(True, alpha=0.3)
# Verify algebraic constraint holds
y_exact_nodes = 1.0 + (y0 - 1.0) * np.exp(-t_x)
x_exact_nodes = 1.0 / y_exact_nodes
error = np.abs(x_sol - x_exact_nodes)
ax2.semilogy(t_x, error, "bo-", markersize=3)
ax2.set_xlabel("t")
ax2.set_ylabel("Absolute error")
ax2.set_title("DAE Solution Error")
ax2.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print(f"Max error in x: {np.max(error):.2e}")
Status: optimal

Max error in x: 9.05e-01
8. Method of Lines: 1D Heat Equation#
The method of lines (MOL) converts a PDE into a system of ODEs by discretizing the spatial domain and leaving the time domain continuous. For the 1D heat equation:
we discretize the spatial domain \([0, 1]\) into \(N\) interior points using central differences for \(\partial^2 T / \partial x^2\), yielding an ODE system:
with \(T_0 = T_{N+1} = 0\) (boundary conditions).
The n_components parameter in add_state() lets us represent the spatial
grid as a vector-valued state.
alpha = 0.1 # thermal diffusivity
N = 10 # interior spatial points
dx = 1.0 / (N + 1)
# Spatial grid (interior points only; boundaries are fixed at 0)
x_grid = np.linspace(dx, 1.0 - dx, N)
# Initial condition: T(x, 0) = sin(pi * x)
T0 = np.sin(np.pi * x_grid)
m = Model("heat_equation")
cs = ContinuousSet("t", bounds=(0, 2), nfe=15, ncp=3)
dae = DAEBuilder(m, cs)
# Vector-valued state: T has N components (one per spatial grid point)
dae.add_state("T", n_components=N, initial=T0, bounds=(-2, 2))
def heat_rhs(t, states, alg, ctrl):
T = states["T"] # list of N expressions
dTdt = []
for i in range(N):
T_left = T[i - 1] if i > 0 else 0.0 # T=0 at left boundary
T_right = T[i + 1] if i < N - 1 else 0.0 # T=0 at right boundary
dTdt.append(alpha * (T_left - 2 * T[i] + T_right) / dx**2)
return {"T": dTdt}
dae.set_ode(heat_rhs)
dae.discretize()
m.minimize(0)
result = m.solve()
print(f"Status: {result.status}")
# Extract solution at several time snapshots
t_sol, T_sol = dae.extract_solution(result, "T")
# Add boundary points for plotting
x_full = np.concatenate([[0], x_grid, [1]])
# Plot several time snapshots
plt.figure(figsize=(8, 5))
n_snapshots = 6
snapshot_indices = np.linspace(0, len(t_sol) - 1, n_snapshots, dtype=int)
for idx in snapshot_indices:
T_interior = T_sol[idx, :]
T_full = np.concatenate([[0], T_interior, [0]]) # add boundary values
plt.plot(x_full, T_full, "o-", markersize=3, label=f"t = {t_sol[idx]:.2f}")
# Exact solution: T(x,t) = sin(pi*x) * exp(-alpha*pi^2*t)
x_fine = np.linspace(0, 1, 100)
plt.plot(x_fine, np.sin(np.pi * x_fine), "k--", linewidth=1, alpha=0.5, label="Initial")
plt.xlabel("x")
plt.ylabel("T(x, t)")
plt.title("1D Heat Equation (Method of Lines)")
plt.legend(fontsize=8)
plt.grid(True, alpha=0.3)
plt.show()
# Check against exact solution at final time
t_final = t_sol[-1]
T_exact_final = np.sin(np.pi * x_grid) * np.exp(-alpha * np.pi**2 * t_final)
T_num_final = T_sol[-1, :]
mol_error = np.max(np.abs(T_num_final - T_exact_final))
print(f"Max error at t={t_final:.2f} (vs exact PDE solution): {mol_error:.4e}")
print("(Error includes spatial discretization from central differences)")
Status: optimal
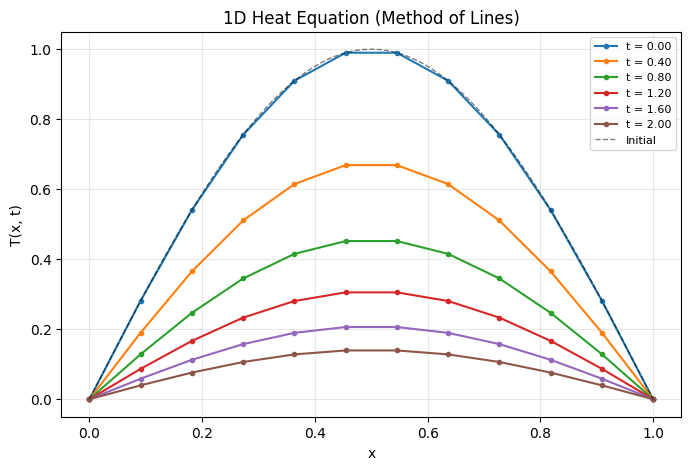
Max error at t=2.00 (vs exact PDE solution): 1.8522e-03
(Error includes spatial discretization from central differences)
9. Finite-Difference Discretization#
For problems where high-order accuracy is not needed, finite differences
offer a simpler alternative to collocation. The FDBuilder class provides
the same high-level interface as DAEBuilder but uses finite-difference
stencils (backward Euler, forward Euler, or central differences) instead of
orthogonal collocation.
State variables have shape (nfe + 1,) — values at all grid points including
both endpoints. Controls are piecewise constant per interval.
Let’s solve the same exponential decay \(dx/dt = -x\) using backward Euler and compare accuracy with the collocation approach.
nfe_values = [10, 20, 40]
fig, axes = plt.subplots(1, 2, figsize=(10, 4))
t_exact = np.linspace(0, 5, 200)
x_exact = np.exp(-t_exact)
axes[0].plot(t_exact, x_exact, "k-", linewidth=2, label="Exact")
colors = ["b", "r", "g"]
for nfe, color in zip(nfe_values, colors):
# FDBuilder uses backward Euler by default
m_fd = Model(f"fd_{nfe}")
cs_fd = ContinuousSet("t", bounds=(0, 5), nfe=nfe)
fd = FDBuilder(m_fd, cs_fd, method="backward")
fd.add_state("x", initial=1.0, bounds=(0, 2))
fd.set_ode(lambda t, states, alg, ctrl: {"x": -states["x"]})
fd.discretize()
m_fd.minimize(0)
result_fd = m_fd.solve()
t_fd, x_fd = fd.extract_solution(result_fd, "x")
error_fd = np.abs(x_fd - np.exp(-t_fd))
axes[0].plot(
t_fd, x_fd, f"{color}o-", markersize=3, linewidth=1, label=f"Backward Euler (nfe={nfe})"
)
axes[1].semilogy(t_fd[1:], error_fd[1:], f"{color}o-", markersize=3, label=f"nfe={nfe}")
axes[0].set_xlabel("t")
axes[0].set_ylabel("x(t)")
axes[0].set_title("Finite Difference Solutions")
axes[0].legend(fontsize=8)
axes[0].grid(True, alpha=0.3)
axes[1].set_xlabel("t")
axes[1].set_ylabel("Absolute error")
axes[1].set_title("FD Error (Backward Euler)")
axes[1].legend(fontsize=8)
axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
# Compare FD vs collocation accuracy
print("\n=== Accuracy comparison (nfe=20) ===")
# Collocation with nfe=20, ncp=3
m_coll = Model("coll_compare")
cs_coll = ContinuousSet("t", bounds=(0, 5), nfe=20, ncp=3)
dae_coll = DAEBuilder(m_coll, cs_coll)
dae_coll.add_state("x", initial=1.0, bounds=(0, 2))
dae_coll.set_ode(lambda t, s, a, c: {"x": -s["x"]})
dae_coll.discretize()
m_coll.minimize(0)
r_coll = m_coll.solve()
t_c, x_c = dae_coll.extract_solution(r_coll, "x")
err_coll = np.max(np.abs(x_c - np.exp(-t_c)))
# FD with nfe=20
m_fd2 = Model("fd_compare")
cs_fd2 = ContinuousSet("t", bounds=(0, 5), nfe=20)
fd2 = FDBuilder(m_fd2, cs_fd2, method="backward")
fd2.add_state("x", initial=1.0, bounds=(0, 2))
fd2.set_ode(lambda t, s, a, c: {"x": -s["x"]})
fd2.discretize()
m_fd2.minimize(0)
r_fd2 = m_fd2.solve()
t_f, x_f = fd2.extract_solution(r_fd2, "x")
err_fd = np.max(np.abs(x_f - np.exp(-t_f)))
print(f"Collocation (nfe=20, ncp=3): max error = {err_coll:.2e} ({20 * 4} variables)")
print(f"Backward Euler (nfe=20): max error = {err_fd:.2e} (21 variables)")
print("\nCollocation achieves much higher accuracy for similar problem size,")
print("but finite differences are simpler and work well for coarse approximations.")

=== Accuracy comparison (nfe=20) ===
Collocation (nfe=20, ncp=3): max error = 3.71e-06 (80 variables)
Backward Euler (nfe=20): max error = 4.17e-02 (21 variables)
Collocation achieves much higher accuracy for similar problem size,
but finite differences are simpler and work well for coarse approximations.
Summary#
The discopt.dae module provides two discretization approaches for dynamic
optimization:
Feature |
|
|
|---|---|---|
Accuracy |
High-order (\(2n_{cp}-1\) for Radau) |
First-order (Euler) |
Algebraic variables |
Yes ( |
No |
Second-order ODEs |
Yes ( |
No |
Integral objectives |
Yes ( |
Manual summation |
Least-squares fitting |
Yes ( |
Yes ( |
Non-uniform elements |
Yes ( |
Yes ( |
Problem size |
Larger (more variables per element) |
Smaller |
Best for |
High-accuracy, stiff systems, DAEs |
Quick prototyping, simple ODEs |
Key API methods:
ContinuousSet(name, bounds, nfe, ncp, scheme, element_boundaries)— define the time domainalign_time_grid(t_span, nfe, measurement_times)— snap element boundaries to measurement timesadd_state(name, initial, bounds, n_components)— differential statesadd_algebraic(name, bounds)— algebraic variables (DAEBuilder only)add_control(name, bounds)— piecewise-constant controlsset_ode(rhs)— first-order ODE right-hand sideset_algebraic(rhs)— algebraic equationsset_second_order_ode(rhs)— acceleration for second-order ODEsdiscretize()— generate all variables and constraintsleast_squares(state_name, t_data, y_data)— sum-of-squared-residuals objectiveextract_solution(result, name)— extract time series from solve resultintegral(integrand)— quadrature-based integral expression