Benchmarks by Problem Class#
This notebook systematically benchmarks discopt against standard solvers for each problem class. For each class we:
Generate random problems of increasing size
Measure median-of-3 solve time
Verify solution accuracy
Visualize scaling behavior
LP comparisons use HiGHS [Huangfu and Hall, 2018] and scipy’s linprog. The LP IPM uses a Mehrotra predictor-corrector [Mehrotra, 1992]. MILP uses Branch & Bound [Land and Doig, 1960] with LP relaxations. NLP uses interior-point methods [Nocedal and Wright, 2006].
Class |
discopt Solver |
Comparison Solvers |
Sizes |
|---|---|---|---|
LP |
LP IPM (auto) |
HiGHS, scipy linprog |
n=5,10,20,50,100 |
QP |
QP IPM (auto) |
scipy SLSQP |
n=5,10,20,50,100 |
MILP |
B&B + LP (auto) |
HiGHS MIP |
5-30 vars |
MIQP |
B&B + QP (auto) |
Forced NLP path |
5-12 vars |
NLP |
IPM / Ipopt |
3 backends compared |
2-20 vars |
MINLP |
B&B + NLP |
batch_size comparison |
5-12 vars |
import os
os.environ["JAX_PLATFORMS"] = "cpu"
os.environ["JAX_ENABLE_X64"] = "1"
import time
import warnings
import discopt.modeling as dm
import matplotlib.pyplot as plt
import numpy as np
from scipy.optimize import linprog, minimize
warnings.filterwarnings("ignore")
def median_time(fn, n_trials=3):
"""Run fn n_trials times, return (median_time, last_result)."""
times = []
result = None
for _ in range(n_trials):
t0 = time.perf_counter()
result = fn()
times.append(time.perf_counter() - t0)
return np.median(times), result
print("Setup complete")
Setup complete
1. LP Benchmarks#
Random LP: min c’x s.t. Ax <= b, x >= 0. We compare discopt’s auto-detected LP IPM [Mehrotra, 1992] against HiGHS [Huangfu and Hall, 2018] (simplex) and scipy’s linprog.
from discopt.solvers.lp_highs import solve_lp as highs_solve_lp
lp_sizes = [5, 10, 20, 50, 100]
lp_results = {"discopt": [], "highs": [], "scipy": []}
for n in lp_sizes:
rng = np.random.RandomState(42 + n)
m_cons = max(n // 2, 3)
c_vec = rng.randn(n)
A_mat = rng.randn(m_cons, n)
b_vec = np.abs(A_mat @ np.ones(n)) + 1.0
# --- discopt ---
def run_discopt():
m = dm.Model("lp_bench")
x = m.continuous("x", shape=(n,), lb=0, ub=100)
m.minimize(dm.sum(lambda i: c_vec[i] * x[i], over=range(n)))
for k in range(m_cons):
m.subject_to(dm.sum(lambda i: A_mat[k, i] * x[i], over=range(n)) <= b_vec[k])
return m.solve()
t_disc, r_disc = median_time(run_discopt)
lp_results["discopt"].append(t_disc)
# --- HiGHS ---
bounds = [(0, 100)] * n
t_highs, r_highs = median_time(
lambda: highs_solve_lp(c_vec, A_ub=A_mat, b_ub=b_vec, bounds=bounds)
)
lp_results["highs"].append(t_highs)
# --- scipy ---
scipy_bounds = [(0, 100)] * n
t_scipy, r_scipy = median_time(
lambda: linprog(c_vec, A_ub=A_mat, b_ub=b_vec, bounds=scipy_bounds)
)
lp_results["scipy"].append(t_scipy)
obj_disc = r_disc.objective if r_disc.objective is not None else float("nan")
obj_highs = r_highs.objective if r_highs.objective is not None else float("nan")
obj_scipy = r_scipy.fun if hasattr(r_scipy, "fun") else float("nan")
print(
f"n={n:3d} | discopt: {t_disc:.4f}s (obj={obj_disc:.4f}) | "
f"HiGHS: {t_highs:.4f}s (obj={obj_highs:.4f}) | "
f"scipy: {t_scipy:.4f}s (obj={obj_scipy:.4f})"
)
n= 5 | discopt: 0.0009s (obj=-121.2780) | HiGHS: 0.0001s (obj=-121.2780) | scipy: 0.0005s (obj=-121.2780)
n= 10 | discopt: 0.0008s (obj=-20.5493) | HiGHS: 0.0001s (obj=-20.5493) | scipy: 0.0004s (obj=-20.5493)
n= 20 | discopt: 0.0014s (obj=-357.2774) | HiGHS: 0.0002s (obj=-357.2774) | scipy: 0.0005s (obj=-357.2774)
n= 50 | discopt: 0.0092s (obj=-1694.1677) | HiGHS: 0.0005s (obj=-1694.1677) | scipy: 0.0007s (obj=-1694.1677)
n=100 | discopt: 0.0195s (obj=-2262.3760) | HiGHS: 0.0016s (obj=-2262.3760) | scipy: 0.0022s (obj=-2262.3760)
2. QP Benchmarks#
Random QP: min 0.5 x’Qx + c’x s.t. sum(x) = 1, x >= 0 (portfolio-like). Compare discopt’s QP IPM against scipy SLSQP.
qp_sizes = [5, 10, 20, 50, 100]
qp_results = {"discopt": [], "scipy": []}
for n in qp_sizes:
rng = np.random.RandomState(42 + n)
# Random PSD matrix for covariance
L = rng.randn(n, n) * 0.1
Q = L.T @ L + 0.01 * np.eye(n)
c_vec = rng.randn(n) * 0.01
# --- discopt ---
def run_discopt_qp():
m = dm.Model("qp_bench")
x = m.continuous("x", shape=(n,), lb=0, ub=1)
obj = dm.sum(
lambda i: dm.sum(lambda j: 0.5 * Q[i, j] * x[i] * x[j], over=range(n)), over=range(n)
)
obj = obj + dm.sum(lambda i: c_vec[i] * x[i], over=range(n))
m.minimize(obj)
m.subject_to(dm.sum(x) == 1)
return m.solve()
t_disc, r_disc = median_time(run_discopt_qp)
qp_results["discopt"].append(t_disc)
# --- scipy SLSQP ---
def run_scipy_qp():
def obj_fn(x):
return 0.5 * x @ Q @ x + c_vec @ x
x0 = np.ones(n) / n
cons = {"type": "eq", "fun": lambda x: np.sum(x) - 1}
bounds = [(0, 1)] * n
return minimize(obj_fn, x0, method="SLSQP", bounds=bounds, constraints=cons)
t_scipy, r_scipy = median_time(run_scipy_qp)
qp_results["scipy"].append(t_scipy)
obj_disc = r_disc.objective if r_disc.objective is not None else float("nan")
obj_scipy = r_scipy.fun if hasattr(r_scipy, "fun") else float("nan")
print(
f"n={n:3d} | discopt: {t_disc:.4f}s (obj={obj_disc:.6f}) | "
f"scipy: {t_scipy:.4f}s (obj={obj_scipy:.6f})"
)
n= 5 | discopt: 0.0009s (obj=-0.009683) | scipy: 0.0015s (obj=-0.009683)
n= 10 | discopt: 0.0012s (obj=-0.001253) | scipy: 0.0021s (obj=-0.001251)
n= 20 | discopt: 0.0033s (obj=-0.001864) | scipy: 0.0040s (obj=-0.001862)
n= 50 | discopt: 0.0157s (obj=-0.005861) | scipy: 0.0119s (obj=-0.005860)
n=100 | discopt: 0.0927s (obj=-0.003203) | scipy: 0.0250s (obj=-0.003202)
3. MILP Benchmarks#
Random MILP: min c’x s.t. Ax <= b, x_int in {0,…,ub}, x_cont >= 0. Compare discopt’s B&B+LP [Land and Doig, 1960] against HiGHS MIP [Huangfu and Hall, 2018].
import highspy
milp_sizes = [5, 8, 12, 18, 25]
milp_results = {"discopt": [], "highs": []}
for n in milp_sizes:
rng = np.random.RandomState(42 + n)
n_int = max(n // 3, 2)
n_cont = n - n_int
m_cons = max(n // 2, 3)
c_vec = rng.randn(n)
A_mat = rng.randn(m_cons, n)
b_vec = np.abs(A_mat @ np.ones(n)) + 2.0
# --- discopt ---
def run_discopt_milp():
m = dm.Model("milp_bench")
x_int = m.integer("x_int", shape=(n_int,), lb=0, ub=5)
x_cont = m.continuous("x_cont", shape=(n_cont,), lb=0, ub=10)
obj = dm.sum(lambda i: c_vec[i] * x_int[i], over=range(n_int)) + dm.sum(
lambda i: c_vec[n_int + i] * x_cont[i], over=range(n_cont)
)
m.minimize(obj)
for k in range(m_cons):
lhs = dm.sum(lambda i: A_mat[k, i] * x_int[i], over=range(n_int)) + dm.sum(
lambda i: A_mat[k, n_int + i] * x_cont[i], over=range(n_cont)
)
m.subject_to(lhs <= b_vec[k])
return m.solve(time_limit=30, max_nodes=5000)
t_disc, r_disc = median_time(run_discopt_milp)
milp_results["discopt"].append(t_disc)
# --- HiGHS MIP ---
def run_highs_milp():
h = highspy.Highs()
h.setOptionValue("output_flag", False)
h.setOptionValue("time_limit", 30.0)
for i in range(n_int):
h.addVar(0, 5)
h.changeColIntegrality(i, highspy.HighsVarType.kInteger)
for i in range(n_cont):
h.addVar(0, 10)
h.changeObjectiveSense(highspy.ObjSense.kMinimize)
for i in range(n):
h.changeColCost(i, c_vec[i])
for k in range(m_cons):
indices = list(range(n))
values = A_mat[k].tolist()
h.addRow(-highspy.kHighsInf, b_vec[k], len(indices), indices, values)
h.run()
info = h.getInfoValue("objective_function_value")
return h.getModelStatus(), info[1]
t_highs, r_highs = median_time(run_highs_milp)
milp_results["highs"].append(t_highs)
obj_disc = r_disc.objective if r_disc.objective is not None else float("nan")
obj_highs = r_highs[1] if r_highs[0] == highspy.HighsModelStatus.kOptimal else float("nan")
print(
f"n={n:3d} (int={n_int}) | discopt: {t_disc:.4f}s (obj={obj_disc:.4f}, "
f"status={r_disc.status}) | HiGHS: {t_highs:.4f}s (obj={obj_highs:.4f})"
)
n= 5 (int=2) | discopt: 0.0045s (obj=-13.7409, status=optimal) | HiGHS: 0.0041s (obj=-13.7409)
n= 8 (int=2) | discopt: 0.0022s (obj=-16.3569, status=optimal) | HiGHS: 0.0014s (obj=-16.3569)
n= 12 (int=4) | discopt: 0.0039s (obj=-51.0009, status=optimal) | HiGHS: 0.0022s (obj=-51.0009)
n= 18 (int=6) | discopt: 0.0031s (obj=-57.0748, status=optimal) | HiGHS: 0.0018s (obj=-57.0748)
n= 25 (int=8) | discopt: 0.0036s (obj=-95.6228, status=optimal) | HiGHS: 0.0017s (obj=-95.6228)
4. MIQP Benchmarks#
Compare the specialized MIQP path (B&B + QP relaxation) against forcing the problem through the general NLP path.
miqp_sizes = [4, 6, 8, 10]
miqp_results = {"miqp_path": [], "nlp_path": []}
for n in miqp_sizes:
rng = np.random.RandomState(42 + n)
n_int = max(n // 2, 2)
n_cont = n - n_int
L = rng.randn(n_cont, n_cont) * 0.1
Q = L.T @ L + 0.01 * np.eye(n_cont)
# --- MIQP path (auto-detected) ---
def run_miqp():
m = dm.Model("miqp_bench")
x = m.continuous("x", shape=(n_cont,), lb=0, ub=1)
z = m.binary("z", shape=(n_int,))
obj = dm.sum(
lambda i: dm.sum(lambda j: Q[i, j] * x[i] * x[j], over=range(n_cont)),
over=range(n_cont),
)
obj = obj + dm.sum(lambda i: 0.5 * z[i], over=range(n_int))
m.minimize(obj)
m.subject_to(dm.sum(x) == 1)
for i in range(min(n_cont, n_int)):
m.subject_to(x[i] <= z[i])
return m.solve(time_limit=30, max_nodes=1000)
t_miqp, r_miqp = median_time(run_miqp)
miqp_results["miqp_path"].append(t_miqp)
# --- Forced NLP path (add dummy exp term) ---
def run_nlp_forced():
m = dm.Model("miqp_nlp")
x = m.continuous("x", shape=(n_cont,), lb=0, ub=1)
z = m.binary("z", shape=(n_int,))
obj = dm.sum(
lambda i: dm.sum(lambda j: Q[i, j] * x[i] * x[j], over=range(n_cont)),
over=range(n_cont),
)
obj = obj + dm.sum(lambda i: 0.5 * z[i], over=range(n_int))
obj = obj + 0 * dm.exp(x[0]) # force MINLP
m.minimize(obj)
m.subject_to(dm.sum(x) == 1)
for i in range(min(n_cont, n_int)):
m.subject_to(x[i] <= z[i])
return m.solve(time_limit=30, max_nodes=1000)
t_nlp, r_nlp = median_time(run_nlp_forced)
miqp_results["nlp_path"].append(t_nlp)
obj_miqp = r_miqp.objective if r_miqp.objective is not None else float("nan")
obj_nlp = r_nlp.objective if r_nlp.objective is not None else float("nan")
speedup = t_nlp / t_miqp if t_miqp > 0 else float("nan")
print(
f"n={n:2d} | MIQP path: {t_miqp:.3f}s (obj={obj_miqp:.4f}) | "
f"NLP path: {t_nlp:.3f}s (obj={obj_nlp:.4f}) | speedup: {speedup:.1f}x"
)
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit https://github.com/coin-or/Ipopt
******************************************************************************
n= 4 | MIQP path: 0.003s (obj=0.5202) | NLP path: 1.749s (obj=0.5202) | speedup: 587.3x
n= 6 | MIQP path: 0.003s (obj=0.5265) | NLP path: 3.272s (obj=0.5265) | speedup: 1095.8x
n= 8 | MIQP path: 0.004s (obj=0.5301) | NLP path: 4.550s (obj=0.5301) | speedup: 1207.7x
n=10 | MIQP path: 0.004s (obj=0.5191) | NLP path: 6.855s (obj=0.5191) | speedup: 1537.8x
5. NLP Benchmarks#
Compare discopt’s NLP backends (pure-JAX IPM and Ipopt [Wächter and Biegler, 2006]) on Rosenbrock-like problems of increasing dimension.
nlp_sizes = [2, 5, 10, 15, 20]
nlp_results = {"ipm": [], "ipopt": []}
# Check which backends are available
has_ipopt = True
try:
import cyipopt # noqa: F401
except ImportError:
has_ipopt = False
print("cyipopt not available, skipping Ipopt comparison")
for n in nlp_sizes:
# Rosenbrock: sum of 100*(x_{i+1} - x_i^2)^2 + (1 - x_i)^2
def run_nlp_backend(backend):
m = dm.Model("rosenbrock")
x = m.continuous("x", shape=(n,), lb=-5, ub=5)
obj = dm.sum(
lambda i: 100 * (x[i + 1] - x[i] ** 2) ** 2 + (1 - x[i]) ** 2,
over=range(n - 1),
)
m.minimize(obj)
return m.solve(nlp_solver=backend)
# IPM
t_ipm, r_ipm = median_time(lambda: run_nlp_backend("ipm"))
nlp_results["ipm"].append(t_ipm)
# Ipopt
if has_ipopt:
t_ipopt, r_ipopt = median_time(lambda: run_nlp_backend("ipopt"))
nlp_results["ipopt"].append(t_ipopt)
else:
nlp_results["ipopt"].append(float("nan"))
obj_ipm = r_ipm.objective if r_ipm.objective is not None else float("nan")
line = f"n={n:2d} | IPM: {t_ipm:.4f}s (obj={obj_ipm:.6f})"
if has_ipopt:
obj_ipopt = r_ipopt.objective if r_ipopt.objective is not None else float("nan")
line += f" | Ipopt: {t_ipopt:.4f}s (obj={obj_ipopt:.6f})"
print(line)
n= 2 | IPM: 0.0704s (obj=0.000000) | Ipopt: 0.0694s (obj=0.000000)
n= 5 | IPM: 0.1425s (obj=0.000000) | Ipopt: 0.1420s (obj=0.000000)
n=10 | IPM: 0.3487s (obj=0.000000) | Ipopt: 0.2879s (obj=0.000000)
n=15 | IPM: 0.3553s (obj=0.000000) | Ipopt: 0.6279s (obj=0.000000)
n=20 | IPM: 0.4641s (obj=0.000000) | Ipopt: 0.4553s (obj=0.000000)
6. MINLP Benchmarks#
Self-comparison: how does batch_size affect MINLP solve time? We solve the same problem with batch_size=1, 8, and 16. Larger batches leverage JAX’s vmap for parallel node evaluation [Belotti et al., 2013].
minlp_sizes = [4, 6, 8, 10]
batch_sizes = [1, 8, 16]
minlp_results = {f"batch={bs}": [] for bs in batch_sizes}
for n in minlp_sizes:
rng = np.random.RandomState(42 + n)
n_int = max(n // 3, 2)
n_cont = n - n_int
line_parts = [f"n={n:2d}"]
for bs in batch_sizes:
def run_minlp():
m = dm.Model("minlp_bench")
x = m.continuous("x", shape=(n_cont,), lb=0, ub=5)
y = m.binary("y", shape=(n_int,))
obj = dm.sum(lambda i: dm.exp(x[i] * 0.3) + x[i], over=range(n_cont)) + dm.sum(
lambda i: 3.0 * y[i], over=range(n_int)
)
m.minimize(obj)
m.subject_to(dm.sum(x) >= 2)
for i in range(min(n_cont, n_int)):
m.subject_to(x[i] <= 5 * y[i])
return m.solve(batch_size=bs, time_limit=30, max_nodes=500)
t, r = median_time(run_minlp)
minlp_results[f"batch={bs}"].append(t)
obj_val = r.objective if r.objective is not None else float("nan")
line_parts.append(f"batch={bs}: {t:.3f}s (obj={obj_val:.3f}, nodes={r.node_count})")
print(" | ".join(line_parts))
n= 4 | batch=1: 2.450s (obj=7.822, nodes=5) | batch=8: 2.071s (obj=7.822, nodes=5) | batch=16: 2.344s (obj=7.822, nodes=5)
n= 6 | batch=1: 0.943s (obj=6.700, nodes=1) | batch=8: 1.162s (obj=6.700, nodes=1) | batch=16: 1.032s (obj=6.700, nodes=1)
n= 8 | batch=1: 1.352s (obj=8.647, nodes=1) | batch=8: 1.360s (obj=8.647, nodes=1) | batch=16: 1.406s (obj=8.647, nodes=1)
n=10 | batch=1: 1.373s (obj=9.647, nodes=1) | batch=8: 1.323s (obj=9.647, nodes=1) | batch=16: 1.273s (obj=9.647, nodes=1)
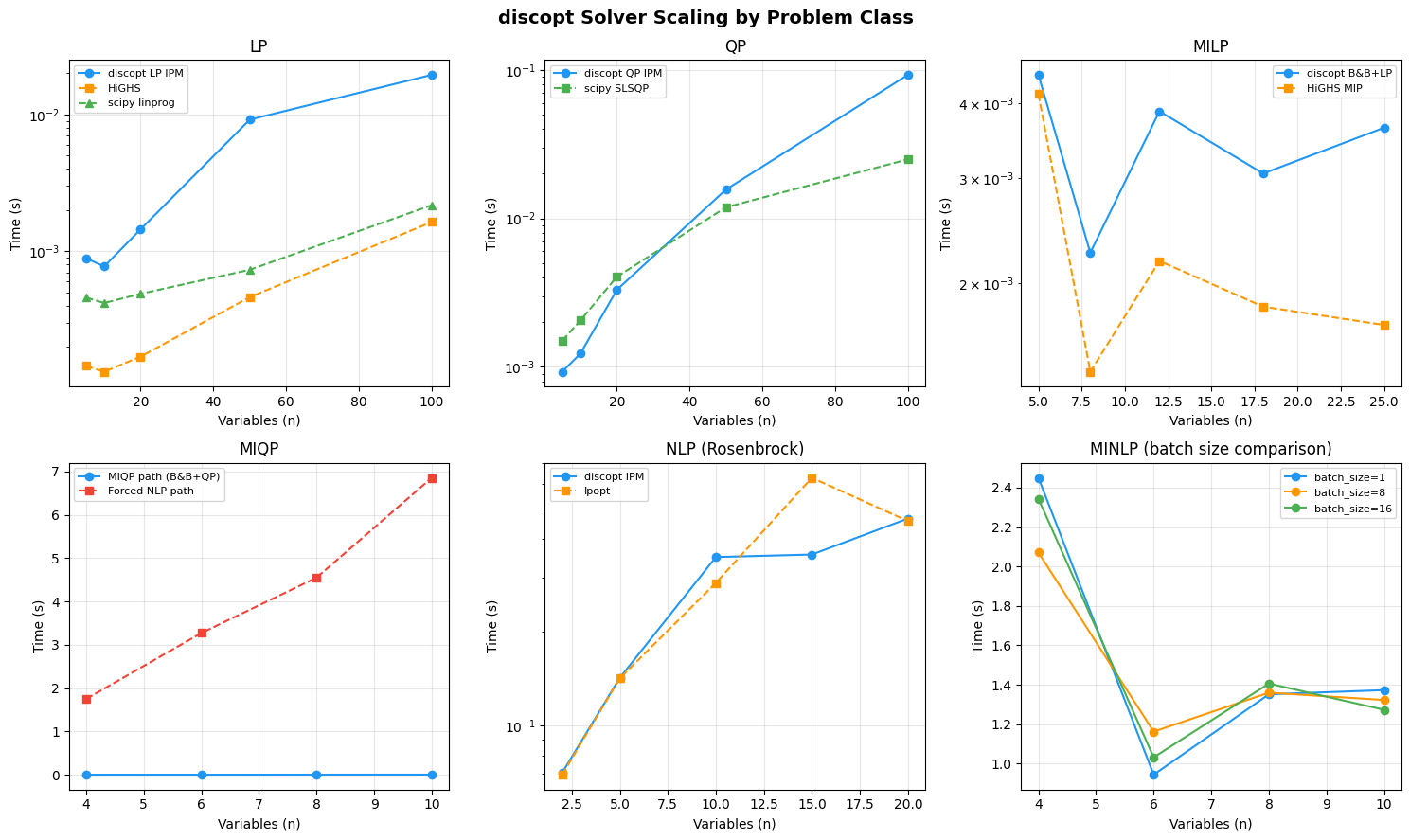
Scaling Visualizations#
A 2x3 grid showing solve time vs problem size for each problem class.
fig, axes = plt.subplots(2, 3, figsize=(15, 9))
fig.suptitle("discopt Solver Scaling by Problem Class", fontsize=14, fontweight="bold")
# LP
ax = axes[0, 0]
ax.semilogy(lp_sizes, lp_results["discopt"], "o-", label="discopt LP IPM", color="#2196F3")
ax.semilogy(lp_sizes, lp_results["highs"], "s--", label="HiGHS", color="#FF9800")
ax.semilogy(lp_sizes, lp_results["scipy"], "^--", label="scipy linprog", color="#4CAF50")
ax.set_xlabel("Variables (n)")
ax.set_ylabel("Time (s)")
ax.set_title("LP")
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3)
# QP
ax = axes[0, 1]
ax.semilogy(qp_sizes, qp_results["discopt"], "o-", label="discopt QP IPM", color="#2196F3")
ax.semilogy(qp_sizes, qp_results["scipy"], "s--", label="scipy SLSQP", color="#4CAF50")
ax.set_xlabel("Variables (n)")
ax.set_ylabel("Time (s)")
ax.set_title("QP")
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3)
# MILP
ax = axes[0, 2]
ax.semilogy(milp_sizes, milp_results["discopt"], "o-", label="discopt B&B+LP", color="#2196F3")
ax.semilogy(milp_sizes, milp_results["highs"], "s--", label="HiGHS MIP", color="#FF9800")
ax.set_xlabel("Variables (n)")
ax.set_ylabel("Time (s)")
ax.set_title("MILP")
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3)
# MIQP
ax = axes[1, 0]
ax.plot(miqp_sizes, miqp_results["miqp_path"], "o-", label="MIQP path (B&B+QP)", color="#2196F3")
ax.plot(miqp_sizes, miqp_results["nlp_path"], "s--", label="Forced NLP path", color="#F44336")
ax.set_xlabel("Variables (n)")
ax.set_ylabel("Time (s)")
ax.set_title("MIQP")
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3)
# NLP
ax = axes[1, 1]
ax.semilogy(nlp_sizes, nlp_results["ipm"], "o-", label="discopt IPM", color="#2196F3")
if has_ipopt:
ax.semilogy(nlp_sizes, nlp_results["ipopt"], "s--", label="Ipopt", color="#FF9800")
ax.set_xlabel("Variables (n)")
ax.set_ylabel("Time (s)")
ax.set_title("NLP (Rosenbrock)")
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3)
# MINLP
ax = axes[1, 2]
colors_bs = ["#2196F3", "#FF9800", "#4CAF50"]
for idx, bs in enumerate(batch_sizes):
ax.plot(
minlp_sizes,
minlp_results[f"batch={bs}"],
"o-",
label=f"batch_size={bs}",
color=colors_bs[idx],
)
ax.set_xlabel("Variables (n)")
ax.set_ylabel("Time (s)")
ax.set_title("MINLP (batch size comparison)")
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3)
plt.tight_layout()
plt.savefig("benchmarks_by_class.png", dpi=150, bbox_inches="tight")
plt.show()
print("Plot saved to benchmarks_by_class.png")
Plot saved to benchmarks_by_class.png
Summary#
Key observations:
LP/QP: discopt’s specialized IPM is competitive with HiGHS [Huangfu and Hall, 2018] and scipy for small-to-medium problems. HiGHS (C++ simplex) is faster for large LPs, as expected for a mature production solver.
MILP: HiGHS MIP is significantly faster due to presolve, cutting planes, and decades of engineering. discopt’s B&B+LP path [Land and Doig, 1960] is correct but not yet competitive on large instances.
MIQP: The specialized MIQP path (B&B + QP relaxation) offers significant speedup over forcing the problem through the general NLP path.
NLP: The pure-JAX IPM and Ipopt [Wächter and Biegler, 2006] produce equivalent solutions. IPM benefits from JIT compilation for repeated solves.
MINLP: Larger batch sizes improve throughput via JAX’s vmap parallelism when the B&B tree has enough open nodes [Belotti et al., 2013].